
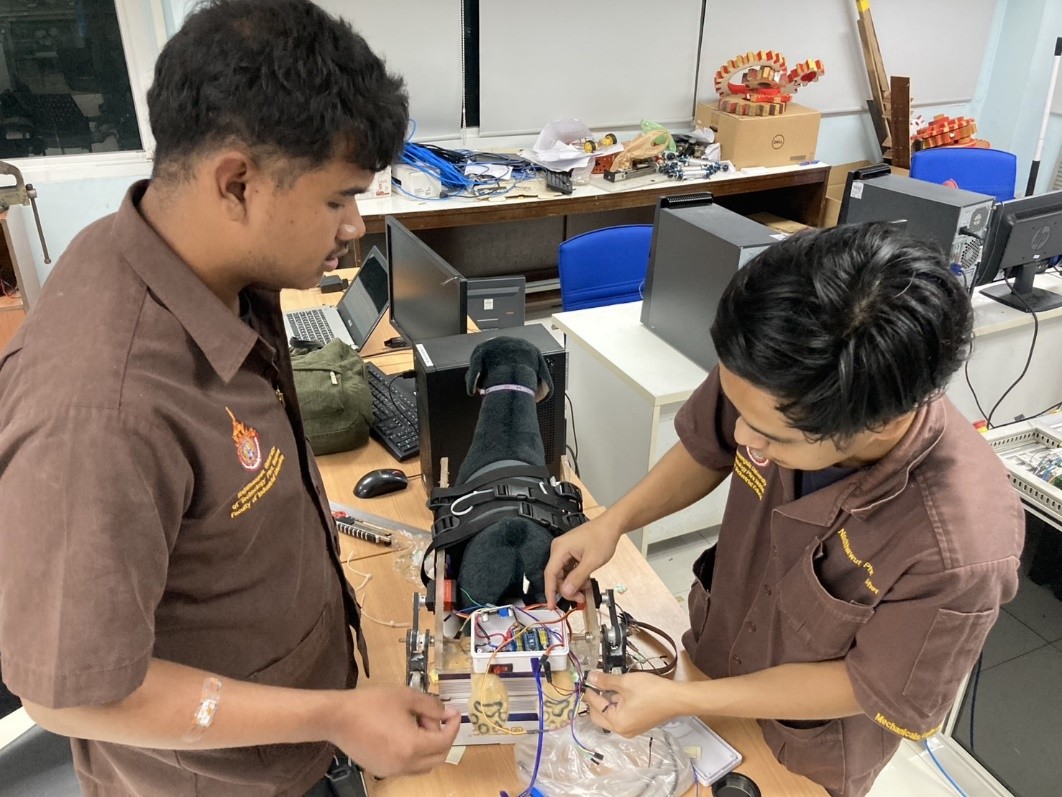
สวัสดีจ้า “Campus Life” กลับมาประจำการ พร้อมนำเสนอผลงานเจ๋งๆของหนุ่ม-สาว ในรั้วมหาวิทยาลัยกันแล้วจ้า โดยสัปดาห์นี้เป็นผลงาน “ระบบช่วยควบคุมวีลแชร์สุนัขแบบอัตโนมัติ” ของหนุ่มๆ นักศึกษาสาขาวิศวกรรมเครื่องกล คณะครุศาสตร์อุตสาหกรรม มทร.พระนคร ประกอบด้วย “ปุญญพัตน์ เทียนไชย”, “ณัฐวุฒิ พรหมเพชร” และ “แวอับดุลฮากีม แวสาเหาะ” จ้า
“แวอับดุลฮากีม” เล่าว่า วีลแชร์ เป็นอุปกรณ์ทางการแพทย์ ที่ช่วยส่งเสริมการเคลื่อนไหวให้กับผู้มีปัญหาการเดิน การทรงตัว หรือการเคลื่อนไหวทางร่างกาย ที่ไม่ใช่สำหรับมนุษย์เท่านั้น ปัจจุบันยังมีการออกแบบวีลแชร์มาใช้กับสุนัขที่พิการ โดยวีลแชร์ที่เห็นทั่วไปมีหลายรูปแบบ วัสดุ และราคา รวมถึงที่ประดิษฐ์ขึ้นเองจากท่อพีวีซี ราคาตั้งแต่หลักร้อยจนถึงหลักหมื่น ซึ่งวีลแชร์ที่จะนำมาใช้กับสัตว์เลี้ยงพิการ จะต้องออกแบบด้วยวัสดุที่แข็งแรง และมีขนาดเฉพาะตัวของสัตว์นั้น เนื่องจากจะช่วยให้มีการถ่ายเทน้ำหนักที่ถูกต้อง ส่งผลให้สัตว์พิการเคลื่อนไหวได้อย่างเป็นธรรมชาติ แต่หากวีลแชร์มีน้ำหนักมากเกินไป ทำให้ต้องรับภาระจากการลากน้ำหนัก ทำให้การงอตัวของสุนัขไม่สะดวก หรือมีการกระแทกที่แข็งกระด้างเกินไป ก็จะทำให้เกิดปัญหากับสุนัขได้ จากข้อจำกัดดังกล่าว จึงร่วมกับเพื่อนๆประดิษฐ์ “ระบบช่วยควบคุมวีลแชร์สุนัขแบบอัตโนมัติ” เพื่อช่วยสุนัขพิการทางขาให้กลับมาใช้ชีวิตใกล้เคียงกับสุนัขปกติได้มากที่สุด โดยมี ดร.วิชชา อุปภัย อาจารย์ประจำสาขาวิชาวิศวกรรมเครื่องกล เป็นที่ปรึกษาโครงการ
“แวอับดุลฮากีม” บอกอีกว่า จากการหาข้อมูลพบว่าวีลแชร์จากท่อพีวีซีในท้องตลาดทั่วไป เป็นแค่โครงสร้างที่ใช้ช่วยในการประคองการยืนทรงตัว และการเคลื่อนที่ของสุนัขเท่านั้น ไม่สามารถปรับท่านั่ง หรือนอนได้อย่างอิสระ ส่วนอีกชนิดคือ วีลแชร์สุนัขแบบกึ่งอัตโนมัติเกรดสแตนเลสทางการแพทย์ ก็จะมีราคาสูงมาก อีกทั้งยังต้องให้ผู้เลี้ยงดูประคองในการลุกหรือนั่งของสุนัขเวลาใช้งาน ดังนั้นการประดิษฐ์วีลแชร์สุนัขแบบอัตโนมัติ จึงออกแบบให้รองรับการใช้งานได้เหมาะสมมากยิ่งขึ้น โดยติดตั้งเซ็นเซอร์อัลตร้าโซนิกในตำแหน่งบริเวณขาหน้าและขาหลัง ซึ่งเซนเซอร์จะคอยจับระยะ ระหว่างพื้นและตัวสุนัขซึ่งจะเป็นตัวบ่งบอกพฤติกรรม เช่น ยืน เดิน นอน วิ่ง โดยไม่ต้องมีคนคอยประคองดูแล และปรับเปลี่ยนโครงสร้างจากท่อ PVC เป็นแผ่นอะคริลิกให้ทนทานแข็งแรงด้วย ซึ่งวีลแชร์ต้นแบบมีความจุของแบตเตอรี่อยู่ที่ 30 นาที ต่อการชาร์จหนึ่งครั้ง และการรับน้ำหนักตัวของสุนัขสูงสุดที่ 15 กิโลกรัม

“ณัฐวุฒิ” กล่าวเสริมว่า การออกแบบวีลแชร์สุนัขแบบอัตโนมัติ ได้ทดสอบระบบควบคุมในรูปแบบต่าง ๆ จำนวน 3 รูปแบบ เพื่อให้การทำงานเป็นไปอย่างเหมาะสมกับการใช้ชีวิตของสุนัขมากที่สุด ประกอบด้วย 1. การทดสอบเซ็นเซอร์วัดค่าสั่นสะเทือน เพื่อทำการปรับท่านั่งและยืนของสุนัข 2. การทดสอบเซ็นเซอร์อัลตร้าโซนิก Module HC-SR04 จำนวน 2 ตัว ให้ทำงานร่วมกัน เพื่อปรับองศาความสูง และองศาการเอียงตัวของสุนัข และ 3.การทดสอบเซนเซอร์อัลตร้าโซนิก Module HC-SR04 จำนวน 1 ตัว เพื่อส่งข้อมูลระหว่างระยะหน้าอกกับพื้น โดยเซ็นเซอร์ทั้งสามเป็นตัวส่งข้อมูลการเคลื่อนตัวของสุนัขไปประมวลผลผ่านบอร์ดอาดูโน่ (ARDUINO) ซึ่งจากการทดสอบประสิทธิภาพการใช้งานของเซ็นเซอร์ทั้งสาม โดยการทดสอบระบบการยกตัว ความไวการยก และพับขาสุนัขในลักษณะที่แตกต่างกัน พบว่า การใช้เซนเซอร์อัลตร้าโซนิก Module HC-SR04 มีความแม่นยำและความเสถียรประมาณ 80% และตอบสนองได้ 100% ส่งผลให้ระบบสามารถปรับขาอัตโนมัติได้อย่างรวดเร็วและแม่นยำ ในส่วนของเซนเซอร์อัลตร้าโซนิก Module HC-SR04 มีความแม่นยำและความเสถียรอยู่ที่ 60–65% เนื่องจากการตรวจจับเป็นแบบมุมมองเดียว สุดท้ายเซ็นเซอร์วัดค่าสั่นสะเทือนมีความแม่นยำและความเสถียรของสัญญาณต่ำกว่า 50% การตรวจจับแรงสั่นสะเทือนไม่สม่ำเสมอ ไม่เหมาะสมต่อการใช้งานในระบบวีลแชร์ฯ

ทีมนักศึกษาหนุ่มกลุ่มนี้ ยังไม่หยุดที่จะพัฒนา “ระบบช่วยควบคุมวีลแชร์สุนัขแบบอัตโนมัติ” ต่อไป โดยเฉพาะการพัฒนาในส่วนชิ้นงานโครงสร้างและการรับน้ำหนัก เพื่อให้สามารถช่วยเหลือสุนัขในแบบที่แตกต่างกันไปตามลักษณะความพิการ รวมถึงการเคลื่อนไหวในชีวิตประจำวันทั้งการวิ่ง กระโดด นั่ง นอน และกลิ้งตัวด้วย สำหรับผู้สนใจสอบถามข้อมูลเพิ่มเติมกันได้ที่โทร.0-2665-3888 ต่อ 7131, 7146


